Scientific Research科学研究
当前筛选条件:
[ 黑龙江省原子能研究院 ]
基于CPLD技术的核工业机器人双模态转换开关的研制黑龙江省原子能研究院
项目名称:基于CPLD技术的核工业机器人双模态转换开关的研制
项目级别:院青年基金重点项目(院级)
起止时间:2013.4-2014.11
主要参加人员:卫光、白玉磊、张磊
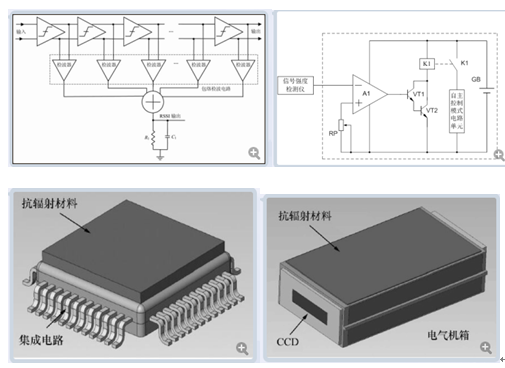
项目介绍:在核辐射环境下,机器人可以采用有线控制方式,但有线控制受到其控制范围小、有可能发生缠绕等因素的影响,会对完成任务带来其他困难。而无线控制又会受到电磁强烈干扰与坚固厂房、安全壳的屏蔽的影响,使得通信条件恶化,数据传输困难,一旦发生通信中断失去控制,机器人的回收又将成为事故处理过程中的新问题。在事故中处理不能让机器人完全自主操作,必须有人员进行干预,临机处理突发事件。本课题在双模态工作方式采用自主与遥控结合的方式基础上设计一种可以在两种模式之间自主切换的电路控制模块。既当通信受到阻碍时,机器人可以自行的切换到自主控制方式,从而继续完成任务或选择按原路退回,可以解决当机器人由于通信终端而失去控制困在事故区导致机器人难以收回的问题,大大降低不必要的损失。